Dropout and Batch Normalization
There’s more to the world of deep learning than just dense layers. There are dozens of kinds of layers you might add to a model. (Try browsing through the Keras docs for a sample!) Some are like dense layers and define connections between neurons, and others can do preprocessing or transformations of other sorts.
In this lesson, we’ll learn about a two kinds of special layers, not containing any neurons themselves, but that add some functionality that can sometimes benefit a model in various ways. Both are commonly used in modern architectures.
Dropout
The first of these is the “dropout layer”, which can help correct overfitting.
In the last lesson we talked about how overfitting is caused by the network learning spurious patterns in the training data. To recognize these spurious patterns a network will often rely on very a specific combinations of weight, a kind of “conspiracy” of weights. Being so specific, they tend to be fragile: remove one and the conspiracy falls apart.
This is the idea behind dropout. To break up these conspiracies, we randomly drop out some fraction of a layer’s input units every step of training, making it much harder for the network to learn those spurious patterns in the training data. Instead, it has to search for broad, general patterns, whose weight patterns tend to be more robust.
You could also think about dropout as creating a kind of ensemble of networks. The predictions will no longer be made by one big network, but instead by a committee of smaller networks. Individuals in the committee tend to make different kinds of mistakes, but be right at the same time, making the committee as a whole better than any individual. (If you’re familiar with random forests as an ensemble of decision trees, it’s the same idea.)
Adding Dropout
In Keras, the dropout rate argument rate defines what percentage of the input units to shut off. Put the Dropout layer just before the layer you want the dropout applied to:
keras.Sequential([
# ...
layers.Dropout(rate=0.3), # apply 30% dropout to the next layer
layers.Dense(16),
# ...
])
Batch Normalization
The next special layer we’ll look at performs “batch normalization” (or “batchnorm”), which can help correct training that is slow or unstable.
With neural networks, it’s generally a good idea to put all of your data on a common scale, perhaps with something like scikit-learn’s StandardScaler or MinMaxScaler. The reason is that SGD will shift the network weights in proportion to how large an activation the data produces. Features that tend to produce activations of very different sizes can make for unstable training behavior.
Now, if it’s good to normalize the data before it goes into the network, maybe also normalizing inside the network would be better! In fact, we have a special kind of layer that can do this, the batch normalization layer. A batch normalization layer looks at each batch as it comes in, first normalizing the batch with its own mean and standard deviation, and then also putting the data on a new scale with two trainable rescaling parameters. Batchnorm, in effect, performs a kind of coordinated rescaling of its inputs.
Most often, batchnorm is added as an aid to the optimization process (though it can sometimes also help prediction performance). Models with batchnorm tend to need fewer epochs to complete training. Moreover, batchnorm can also fix various problems that can cause the training to get “stuck”. Consider adding batch normalization to your models, especially if you’re having trouble during training.
Adding Batch Normalization
It seems that batch normalization can be used at almost any point in a network. You can put it after a layer…
layers.Dense(16, activation='relu'),
layers.BatchNormalization(),
… or between a layer and its activation function:
layers.Dense(16),
layers.BatchNormalization(),
layers.Activation('relu'),
Example - Using Dropout and Batch Normalization
Let’s continue developing the Red Wine model. Now we’ll increase the capacity even more, but add dropout to control overfitting and batch normalization to speed up optimization. This time, we’ll also leave off standardizing the data, to demonstrate how batch normalization can stabalize the training.
# Setup plotting
import matplotlib.pyplot as plt
plt.style.use('seaborn-whitegrid')
# Set Matplotlib defaults
plt.rc('figure', autolayout=True)
plt.rc('axes', labelweight='bold', labelsize='large',
titleweight='bold', titlesize=18, titlepad=10)
import pandas as pd
red_wine = pd.read_csv('../input/dl-course-data/red-wine.csv')
# Create training and validation splits
df_train = red_wine.sample(frac=0.7, random_state=0)
df_valid = red_wine.drop(df_train.index)
# Split features and target
X_train = df_train.drop('quality', axis=1)
X_valid = df_valid.drop('quality', axis=1)
y_train = df_train['quality']
y_valid = df_valid['quality']
When adding dropout, you may need to increase the number of units in your Dense layers.
from tensorflow import keras
from tensorflow.keras import layers
model = keras.Sequential([
layers.Dense(1024, activation='relu', input_shape=[11]),
layers.Dropout(0.3),
layers.BatchNormalization(),
layers.Dense(1024, activation='relu'),
layers.Dropout(0.3),
layers.BatchNormalization(),
layers.Dense(1024, activation='relu'),
layers.Dropout(0.3),
layers.BatchNormalization(),
layers.Dense(1),
])
There’s nothing to change this time in how we set up the training.
model.compile(
optimizer='adam',
loss='mae',
)
history = model.fit(
X_train, y_train,
validation_data=(X_valid, y_valid),
batch_size=256,
epochs=100,
verbose=0,
)
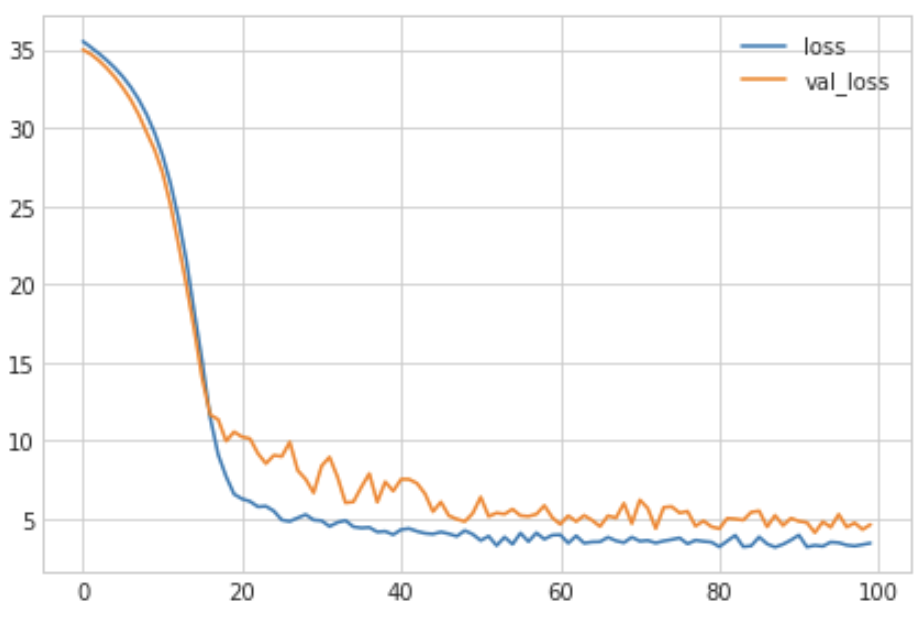
# Show the learning curves
history_df = pd.DataFrame(history.history)
history_df.loc[:, ['loss', 'val_loss']].plot();
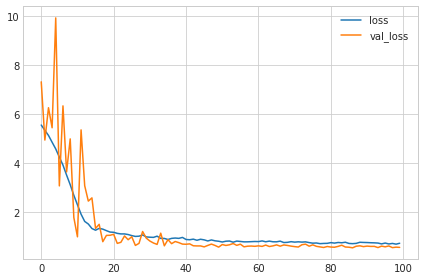
You’ll typically get better performance if you standardize your data before using it for training. That we were able to use the raw data at all, however, shows how effective batch normalization can be on more difficult datasets.
Spotify Example
# Setup plotting
import matplotlib.pyplot as plt
plt.style.use('seaborn-whitegrid')
# Set Matplotlib defaults
plt.rc('figure', autolayout=True)
plt.rc('axes', labelweight='bold', labelsize='large',
titleweight='bold', titlesize=18, titlepad=10)
plt.rc('animation', html='html5')
First load the Spotify dataset.
import pandas as pd
from sklearn.preprocessing import StandardScaler, OneHotEncoder
from sklearn.compose import make_column_transformer
from sklearn.model_selection import GroupShuffleSplit
from tensorflow import keras
from tensorflow.keras import layers
from tensorflow.keras import callbacks
spotify = pd.read_csv('../input/dl-course-data/spotify.csv')
X = spotify.copy().dropna()
y = X.pop('track_popularity')
artists = X['track_artist']
features_num = ['danceability', 'energy', 'key', 'loudness', 'mode',
'speechiness', 'acousticness', 'instrumentalness',
'liveness', 'valence', 'tempo', 'duration_ms']
features_cat = ['playlist_genre']
preprocessor = make_column_transformer(
(StandardScaler(), features_num),
(OneHotEncoder(), features_cat),
)
def group_split(X, y, group, train_size=0.75):
splitter = GroupShuffleSplit(train_size=train_size)
train, test = next(splitter.split(X, y, groups=group))
return (X.iloc[train], X.iloc[test], y.iloc[train], y.iloc[test])
X_train, X_valid, y_train, y_valid = group_split(X, y, artists)
X_train = preprocessor.fit_transform(X_train)
X_valid = preprocessor.transform(X_valid)
y_train = y_train / 100
y_valid = y_valid / 100
input_shape = [X_train.shape[1]]
print("Input shape: {}".format(input_shape))
Add two dropout layers, one after the Dense layer with 128 units, and one after the Dense layer with 64 units. Set the dropout rate on both to 0.3.
model = keras.Sequential([
layers.Dense(128, activation='relu', input_shape=input_shape),
layers.Dropout(0.3),
layers.Dense(64, activation='relu'),
layers.Dropout(0.3),
layers.Dense(1)
])
Now train the model see the effect of adding dropout.
model.compile(
optimizer='adam',
loss='mae',
)
history = model.fit(
X_train, y_train,
validation_data=(X_valid, y_valid),
batch_size=512,
epochs=50,
verbose=0,
)
history_df = pd.DataFrame(history.history)
history_df.loc[:, ['loss', 'val_loss']].plot()
print("Minimum Validation Loss: {:0.4f}".format(history_df['val_loss'].min()))
Minimum Validation Loss: 0.1985
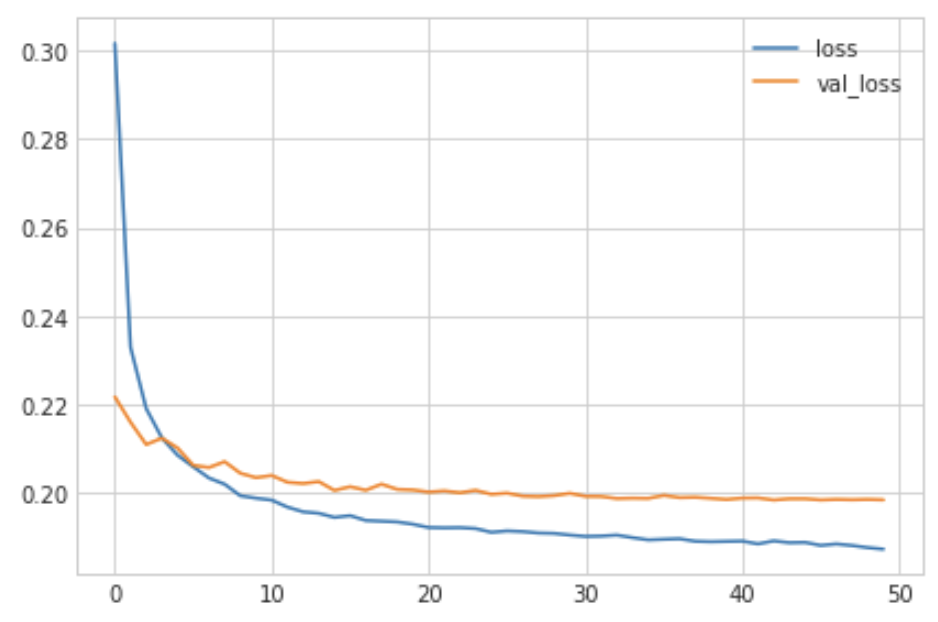
From the learning curves, you can see that the validation loss remains near a constant minimum even though the training loss continues to decrease. So we can see that adding dropout did prevent overfitting this time. Moreover, by making it harder for the network to fit spurious patterns, dropout may have encouraged the network to seek out more of the true patterns, possibly improving the validation loss some as well).
Fixing Problems In Training
Now, we’ll switch topics to explore how batch normalization can fix problems in training.
Load the Concrete dataset. We won’t do any standardization this time. This will make the effect of batch normalization much more apparent.
import pandas as pd
concrete = pd.read_csv('../input/dl-course-data/concrete.csv')
df = concrete.copy()
df_train = df.sample(frac=0.7, random_state=0)
df_valid = df.drop(df_train.index)
X_train = df_train.drop('CompressiveStrength', axis=1)
X_valid = df_valid.drop('CompressiveStrength', axis=1)
y_train = df_train['CompressiveStrength']
y_valid = df_valid['CompressiveStrength']
input_shape = [X_train.shape[1]]
Now train the network on the unstandardized Concrete data.
model = keras.Sequential([
layers.Dense(512, activation='relu', input_shape=input_shape),
layers.Dense(512, activation='relu'),
layers.Dense(512, activation='relu'),
layers.Dense(1),
])
model.compile(
optimizer='sgd', # SGD is more sensitive to differences of scale
loss='mae',
metrics=['mae'],
)
history = model.fit(
X_train, y_train,
validation_data=(X_valid, y_valid),
batch_size=64,
epochs=100,
verbose=0,
)
history_df = pd.DataFrame(history.history)
history_df.loc[0:, ['loss', 'val_loss']].plot()
print(("Minimum Validation Loss: {:0.4f}").format(history_df['val_loss'].min()))
Minimum Validation Loss: nan
Trying to train this network on this dataset will usually fail. Even when it does converge (due to a lucky weight initialization), it tends to converge to a very large number.
Batch normalization can help correct problems like this.
Add four BatchNormalization layers, one before each of the dense layers. (Remember to move the input_shape argument to the new first layer.)
model = keras.Sequential([
layers.BatchNormalization(input_shape=input_shape),
layers.Dense(512, activation='relu'),
layers.BatchNormalization(),
layers.Dense(512, activation='relu'),
layers.BatchNormalization(),
layers.Dense(512, activation='relu'),
layers.BatchNormalization(),
layers.Dense(1),
])
model.compile(
optimizer='sgd',
loss='mae',
metrics=['mae'],
)
EPOCHS = 100
history = model.fit(
X_train, y_train,
validation_data=(X_valid, y_valid),
batch_size=64,
epochs=EPOCHS,
verbose=0,
)
history_df = pd.DataFrame(history.history)
history_df.loc[0:, ['loss', 'val_loss']].plot()
print(("Minimum Validation Loss: {:0.4f}").format(history_df['val_loss'].min()))
Minimum Validation Loss: 4.1072
You can see that adding batch normalization was a big improvement on the first attempt! By adaptively scaling the data as it passes through the network, batch normalization can let you train models on difficult datasets.