Maximum Pooling
Previously, we learned about how the first two operations in this process occur in a Conv2D layer with relu activation. Now we’ll look at the third (and final) operation in this sequence: condense with maximum pooling, which in Keras is done by a MaxPool2D layer.
Condense with Maximum Pooling
Adding condensing step to the model we had before, will give us this:
from tensorflow import keras
from tensorflow.keras import layers
model = keras.Sequential([
layers.Conv2D(filters=64, kernel_size=3), # activation is None
layers.MaxPool2D(pool_size=2),
# More layers follow
])
A MaxPool2D layer is much like a Conv2D layer, except that it uses a simple maximum function instead of a kernel, with the pool_size parameter analogous to kernel_size. A MaxPool2D layer doesn’t have any trainable weights like a convolutional layer does in its kernel, however.
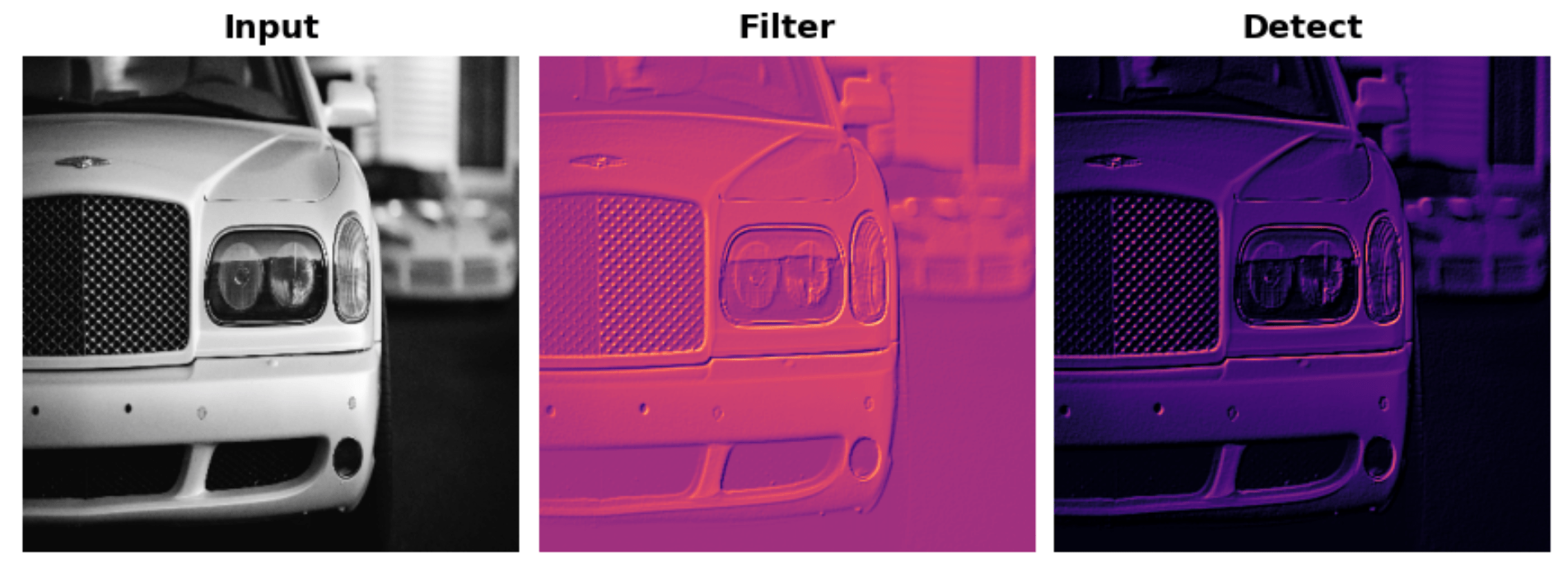
Let’s take another look at the extraction figure. Remember that MaxPool2D is the Condense step.
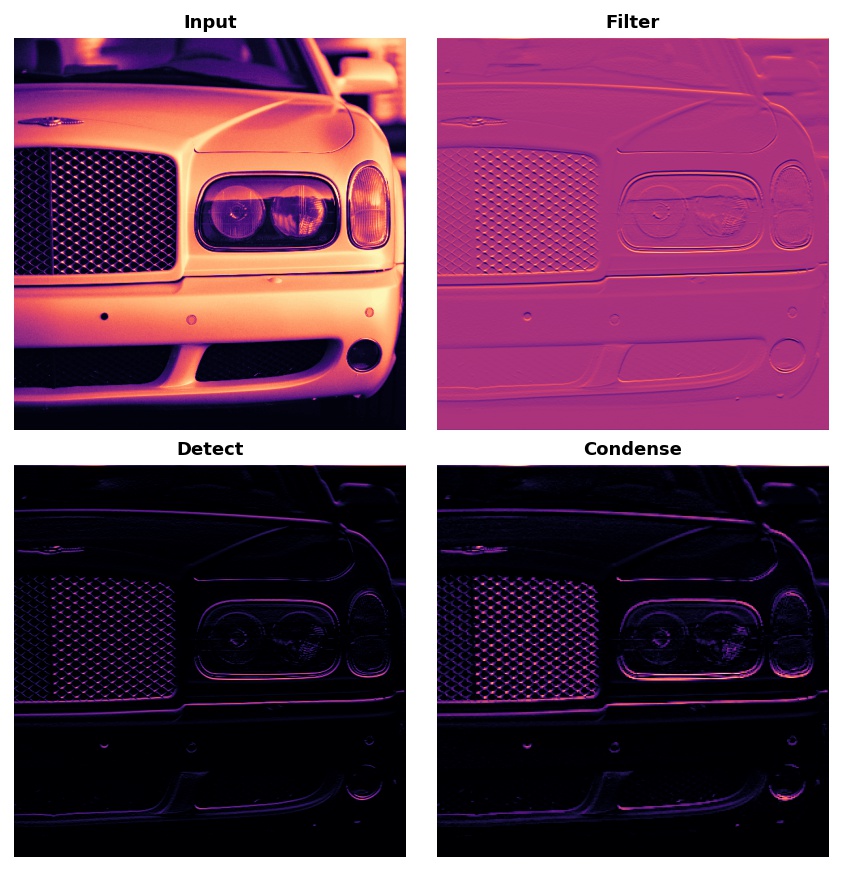
Notice that after applying the ReLU function (Detect) the feature map ends up with a lot of “dead space,” that is, large areas containing only 0’s (the black areas in the image). Having to carry these 0 activations through the entire network would increase the size of the model without adding much useful information. Instead, we would like to condense the feature map to retain only the most useful part – the feature itself.
This in fact is what maximum pooling2 does. Max pooling takes a patch of activations in the original feature map and replaces them with the maximum activation in that patch.
When applied after the ReLU activation, it has the effect of “intensifying” features. The pooling step increases the proportion of active pixels to zero pixels.
Example - Apply Maximum Pooling
Let’s add the “condense” step to the feature extraction. This next hidden cell will take us back to where we left off.
import tensorflow as tf
import matplotlib.pyplot as plt
import warnings
plt.rc('figure', autolayout=True)
plt.rc('axes', labelweight='bold', labelsize='large',
titleweight='bold', titlesize=18, titlepad=10)
plt.rc('image', cmap='magma')
warnings.filterwarnings("ignore") # to clean up output cells
# Read image
image_path = '../input/computer-vision-resources/car_feature.jpg'
image = tf.io.read_file(image_path)
image = tf.io.decode_jpeg(image)
# Define kernel
kernel = tf.constant([
[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1],
], dtype=tf.float32)
# Reformat for batch compatibility.
image = tf.image.convert_image_dtype(image, dtype=tf.float32)
image = tf.expand_dims(image, axis=0)
kernel = tf.reshape(kernel, [*kernel.shape, 1, 1])
# Filter step
image_filter = tf.nn.conv2d(
input=image,
filters=kernel,
strides=1,
padding='SAME'
)
# Detect step
image_detect = tf.nn.relu(image_filter)
# Show what we have so far
plt.figure(figsize=(12, 6))
plt.subplot(131)
plt.imshow(tf.squeeze(image), cmap='gray')
plt.axis('off')
plt.title('Input')
plt.subplot(132)
plt.imshow(tf.squeeze(image_filter))
plt.axis('off')
plt.title('Filter')
plt.subplot(133)
plt.imshow(tf.squeeze(image_detect))
plt.axis('off')
plt.title('Detect')
plt.show();

We’ll use another one of the functions in tf.nn to apply the pooling step, tf.nn.pool. This is a Python function that does the same thing as the MaxPool2D layer you use when model building, but, being a simple function, is easier to use directly.
import tensorflow as tf
image_condense = tf.nn.pool(
input=image_detect, # image in the Detect step above
window_shape=(2, 2),
pooling_type='MAX',
strides=(2, 2),
padding='SAME',
)
plt.figure(figsize=(6, 6))
plt.imshow(tf.squeeze(image_condense))
plt.axis('off')
plt.show();

Pretty cool! Hopefully you can see how the pooling step was able to intensify the feature by condensing the image around the most active pixels.
Translation Invariance
We called the zero-pixels “unimportant”. Does this mean they carry no information at all? In fact, the zero-pixels carry positional information. The blank space still positions the feature within the image. When MaxPool2D removes some of these pixels, it removes some of the positional information in the feature map. This gives a convnet a property called translation invariance. This means that a convnet with maximum pooling will tend not to distinguish features by their location in the image. (“Translation” is the mathematical word for changing the position of something without rotating it or changing its shape or size.)
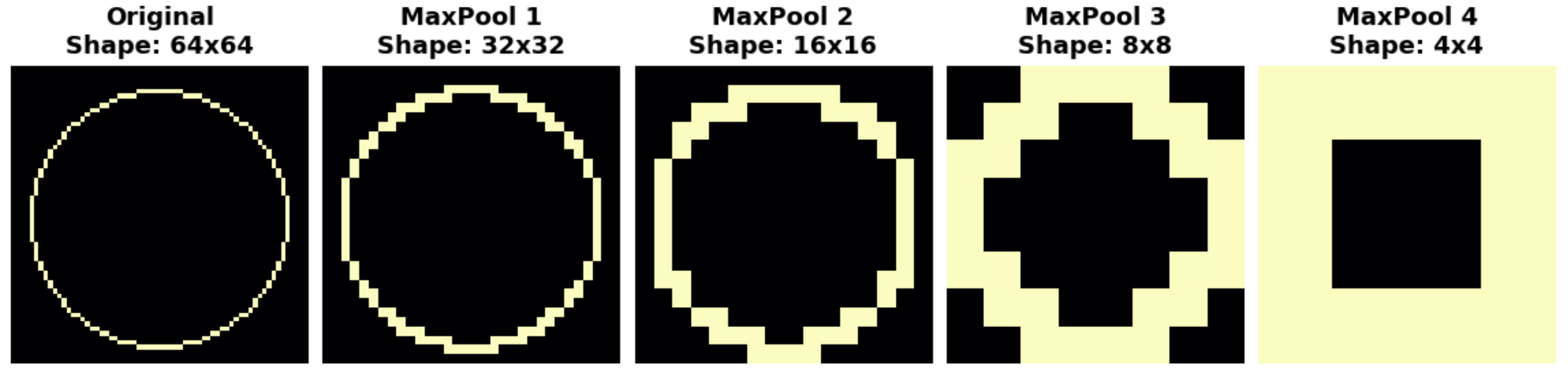
Watch what happens when we repeatedly apply maximum pooling to the following feature map.
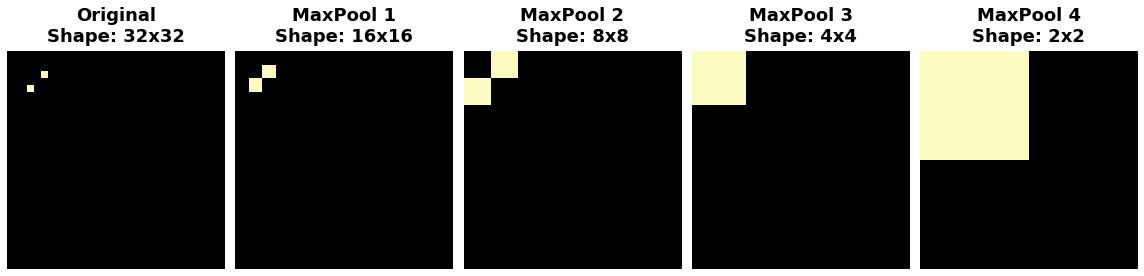
The two dots in the original image became indistinguishable after repeated pooling. In other words, pooling destroyed some of their positional information. Since the network can no longer distinguish between them in the feature maps, it can’t distinguish them in the original image either: it has become invariant to that difference in position.
In fact, pooling only creates translation invariance in a network over small distances, as with the two dots in the image. Features that begin far apart will remain distinct after pooling; only some of the positional information was lost, but not all of it.
This invariance to small differences in the positions of features is a nice property for an image classifier to have. Just because of differences in perspective or framing, the same kind of feature might be positioned in various parts of the original image, but we would still like for the classifier to recognize that they are the same. Because this invariance is built into the network, we can get away with using much less data for training: we no longer have to teach it to ignore that difference. This gives convolutional networks a big efficiency advantage over a network with only dense layers.
Example - Average Pooling
import numpy as np
import tensorflow as tf
import matplotlib.pyplot as plt
from matplotlib import gridspec
import learntools.computer_vision.visiontools as visiontools
plt.rc('figure', autolayout=True)
plt.rc('axes', labelweight='bold', labelsize='large',
titleweight='bold', titlesize=18, titlepad=10)
plt.rc('image', cmap='magma')
# Read image
image_path = '../input/computer-vision-resources/car_illus.jpg'
image = tf.io.read_file(image_path)
image = tf.io.decode_jpeg(image, channels=1)
image = tf.image.resize(image, size=[400, 400])
# Embossing kernel
kernel = tf.constant([
[-2, -1, 0],
[-1, 1, 1],
[0, 1, 2],
])
# Reformat for batch compatibility.
image = tf.image.convert_image_dtype(image, dtype=tf.float32)
image = tf.expand_dims(image, axis=0)
kernel = tf.reshape(kernel, [*kernel.shape, 1, 1])
kernel = tf.cast(kernel, dtype=tf.float32)
image_filter = tf.nn.conv2d(
input=image,
filters=kernel,
strides=1,
padding='VALID',
)
image_detect = tf.nn.relu(image_filter)
# Show what we have so far
plt.figure(figsize=(12, 6))
plt.subplot(131)
plt.imshow(tf.squeeze(image), cmap='gray')
plt.axis('off')
plt.title('Input')
plt.subplot(132)
plt.imshow(tf.squeeze(image_filter))
plt.axis('off')
plt.title('Filter')
plt.subplot(133)
plt.imshow(tf.squeeze(image_detect))
plt.axis('off')
plt.title('Detect')
plt.show();
Apply Pooling to Condense
image_condense = tf.nn.pool(
input=image_detect,
window_shape=(2, 2),
pooling_type='MAX',
strides=(2, 2),
padding='SAME',
)
plt.figure(figsize=(8, 6))
plt.subplot(121)
plt.imshow(tf.squeeze(image_detect))
plt.axis('off')
plt.title("Detect (ReLU)")
plt.subplot(122)
plt.imshow(tf.squeeze(image_condense))
plt.axis('off')
plt.title("Condense (MaxPool)")
plt.show();

We learned about how MaxPool2D layers give a convolutional network the property of translation invariance over small distances. In this exercise, you’ll have a chance to observe this in action.
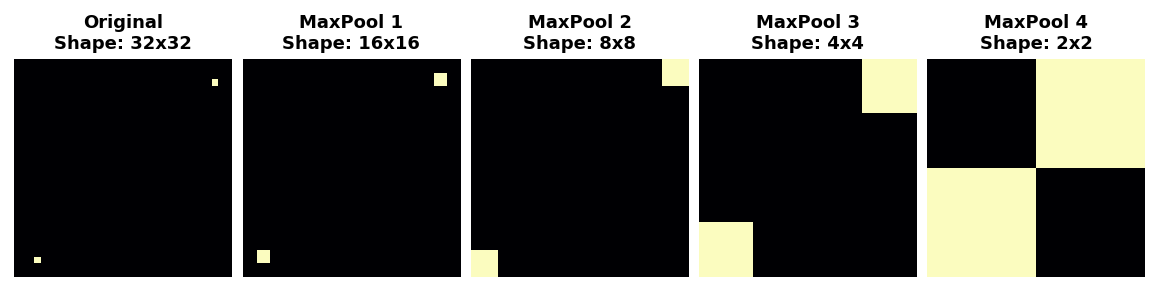
This next code cell will randomly apply a small shift to a circle and then condense the image several times with maximum pooling. Run the cell once and make note of the image that results at the end.
REPEATS = 4
SIZE = [64, 64]
# Create a randomly shifted circle
image = visiontools.circle(SIZE, r_shrink=4, val=1)
image = tf.expand_dims(image, axis=-1)
image = visiontools.random_transform(image, jitter=3, fill_method='replicate')
image = tf.squeeze(image)
plt.figure(figsize=(16, 4))
plt.subplot(1, REPEATS+1, 1)
plt.imshow(image, vmin=0, vmax=1)
plt.title("Original\nShape: {}x{}".format(image.shape[0], image.shape[1]))
plt.axis('off')
# Now condense with maximum pooling several times
for i in range(REPEATS):
ax = plt.subplot(1, REPEATS+1, i+2)
image = tf.reshape(image, [1, *image.shape, 1])
image = tf.nn.pool(image, window_shape=(2,2), strides=(2, 2), padding='SAME', pooling_type='MAX')
image = tf.squeeze(image)
plt.imshow(image, vmin=0, vmax=1)
plt.title("MaxPool {}\nShape: {}x{}".format(i+1, image.shape[0], image.shape[1]))
plt.axis('off')
2021-12-11 23:29:56.002157: I tensorflow/compiler/mlir/mlir_graph_optimization_pass.cc:185] None of the MLIR Optimization Passes are enabled (registered 2)
Explore Invariance
Suppose you had made a small shift in a different direction – what effect would you expect that have on the resulting image? Try running the cell a few more times, if you like, to get a new random shift.
In the tutorial, we talked about how maximum pooling creates translation invariance over small distances. This means that we would expect small shifts to disappear after repeated maximum pooling. If you run the cell multiple times, you can see the resulting image is always the same; the pooling operation destroys those small translations.
Global Average Pooling
We mentioned in the previous exercise that average pooling has largely been superceeded by maximum pooling within the convolutional base. There is, however, a kind of average pooling that is still widely used in the head of a convnet. This is global average pooling. A GlobalAvgPool2D layer is often used as an alternative to some or all of the hidden Dense layers in the head of the network, like so:
model = keras.Sequential([
pretrained_base,
layers.GlobalAvgPool2D(),
layers.Dense(1, activation='sigmoid'),
])
What is this layer doing? Notice that we no longer have the Flatten layer that usually comes after the base to transform the 2D feature data to 1D data needed by the classifier. Now the GlobalAvgPool2D layer is serving this function. But, instead of “unstacking” the feature (like Flatten), it simply replaces the entire feature map with its average value. Though very destructive, it often works quite well and has the advantage of reducing the number of parameters in the model.
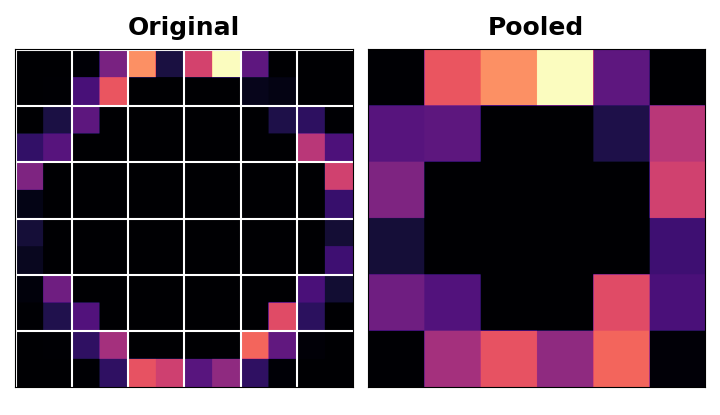
Let’s look at what GlobalAvgPool2D does on some randomly generated feature maps. This will help us to understand how it can “flatten” the stack of feature maps produced by the base.
feature_maps = [visiontools.random_map([5, 5], scale=0.1, decay_power=4) for _ in range(8)]
gs = gridspec.GridSpec(1, 8, wspace=0.01, hspace=0.01)
plt.figure(figsize=(18, 2))
for i, feature_map in enumerate(feature_maps):
plt.subplot(gs[i])
plt.imshow(feature_map, vmin=0, vmax=1)
plt.axis('off')
plt.suptitle('Feature Maps', size=18, weight='bold', y=1.1)
plt.show()
# reformat for TensorFlow
feature_maps_tf = [tf.reshape(feature_map, [1, *feature_map.shape, 1])
for feature_map in feature_maps]
global_avg_pool = tf.keras.layers.GlobalAvgPool2D()
pooled_maps = [global_avg_pool(feature_map) for feature_map in feature_maps_tf]
img = np.array(pooled_maps)[:,:,0].T
plt.imshow(img, vmin=0, vmax=1)
plt.axis('off')
plt.title('Pooled Feature Maps')
plt.show();
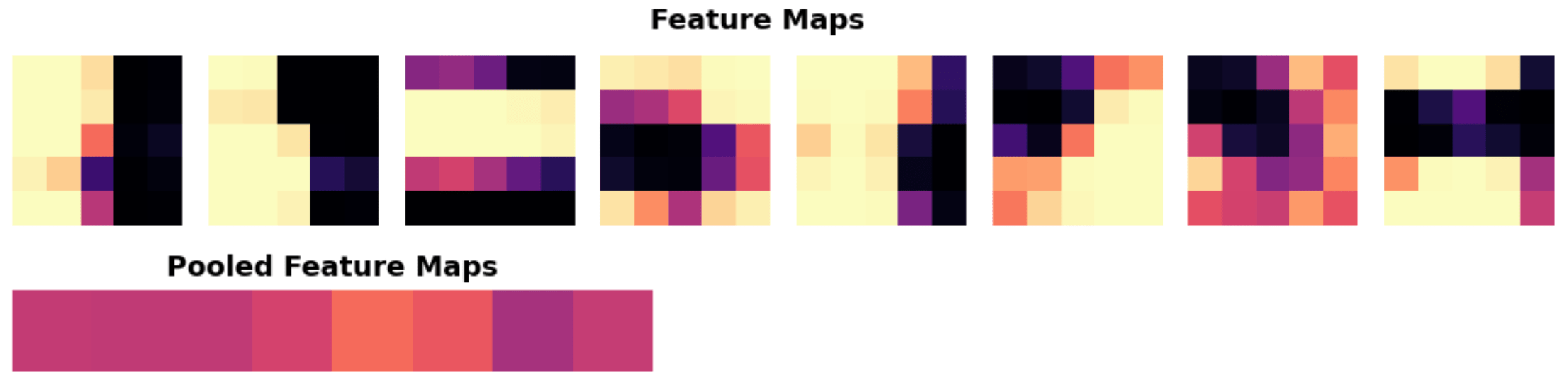
Since each of the 5×5 feature maps was reduced to a single value, global pooling reduced the number of parameters needed to represent these features by a factor of 25 – a substantial savings!
Now we’ll move on to understanding the pooled features.
After we’ve pooled the features into just a single value, does the head still have enough information to determine a class? This part of the exercise will investigate that question.
Let’s pass some images from our Car or Truck dataset through VGG16 and examine the features that result after pooling. First run this cell to define the model and load the dataset.
from tensorflow import keras
from tensorflow.keras import layers
from tensorflow.keras.preprocessing import image_dataset_from_directory
# Load VGG16
pretrained_base = tf.keras.models.load_model(
'../input/cv-course-models/cv-course-models/vgg16-pretrained-base',
)
model = keras.Sequential([
pretrained_base,
# Attach a global average pooling layer after the base
layers.GlobalAvgPool2D(),
])
# Load dataset
ds = image_dataset_from_directory(
'../input/car-or-truck/train',
labels='inferred',
label_mode='binary',
image_size=[128, 128],
interpolation='nearest',
batch_size=1,
shuffle=True,
)
ds_iter = iter(ds)
Found 5117 files belonging to 2 classes.
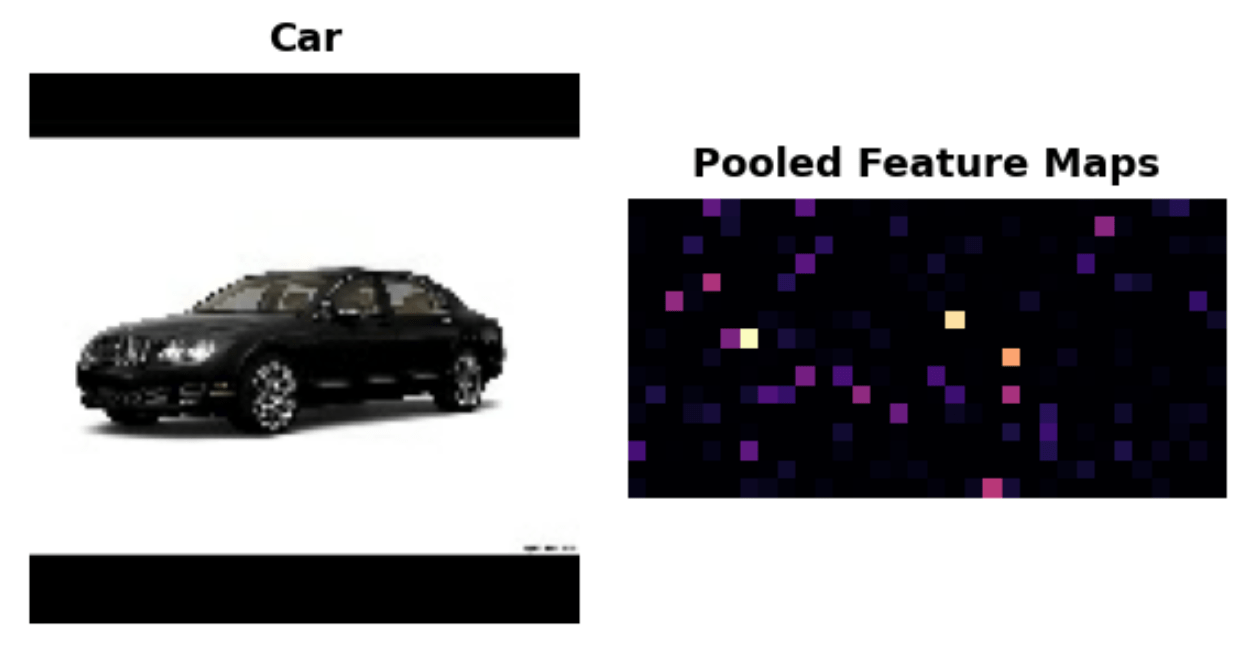
Notice how we’ve attached a GlobalAvgPool2D layer after the pretrained VGG16 base. Ordinarily, VGG16 will produce 512 feature maps for each image. The GlobalAvgPool2D layer reduces each of these to a single value, an “average pixel”, if you like.
This next cell will run an image from the Car or Truck dataset through VGG16 and show you the 512 average pixels created by GlobalAvgPool2D. Run the cell a few times and observe the pixels produced by cars versus the pixels produced by trucks.
car = next(ds_iter)
car_tf = tf.image.resize(car[0], size=[128, 128])
car_features = model(car_tf)
car_features = tf.reshape(car_features, shape=(16, 32))
label = int(tf.squeeze(car[1]).numpy())
plt.figure(figsize=(8, 4))
plt.subplot(121)
plt.imshow(tf.squeeze(car[0]))
plt.axis('off')
plt.title(["Car", "Truck"][label])
plt.subplot(122)
plt.imshow(car_features)
plt.title('Pooled Feature Maps')
plt.axis('off')
plt.show();
Understand the Pooled Features
What do you see? Are the pooled features for cars and trucks different enough to tell them apart? How would you interpret these pooled values? How could this help the classification?
The VGG16 base produces 512 feature maps. We can think of each feature map as representing some high-level visual feature in the original image – maybe a wheel or window. Pooling a map gives us a single number, which we could think of as a score for that feature: large if the feature is present, small if it is absent. Cars tend to score high with one set of features, and Trucks score high with another. Now, instead of trying to map raw features to classes, the head only has to work with these scores that GlobalAvgPool2D produced, a much easier problem for it to solve.
Global average pooling is often used in modern convnets. One big advantage is that it greatly reduces the number of parameters in a model, while still telling you if some feature was present in an image or not – which for classification is usually all that matters. If you’re creating a convolutional classifier it’s worth trying out!
Conclusion
In this example we explored the final operation in the feature extraction process: condensing with maximum pooling. Pooling is one of the essential features of convolutional networks and helps provide them with some of their characteristic advantages: efficiency with visual data, reduced parameter size compared to dense networks, translation invariance. We’ve seen that it’s used not only in the base during feature extraction, but also can be used in the head during classification. Understanding it is essential to a full understanding of convnets.